厂商 :上海优爱宝智能机器人科技股份有限公司
上海市 上海市- 主营产品:
- 电机驱动器
- 浮球矩阵
- 步进电机
86系列步进电机
采用优质冷轧钢片和耐高温永磁体制造,具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。
混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。按定子上绕组来分,共有二相、三相和五相等系列。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。建议用户在选择驱动器时选择硬件细分型驱动器,
判断需多大力矩:静扭矩是选择步进电机的主要参数之一。负载大时,需采用大力矩电机。力矩指标大时,电机外形也大。判断电机运转速度:转速要求高时,应选相电流较大、电感较小的电机,以增加功率输入。且在选择驱动器时采用较高供电电压。选择电机的安装规格:如42、57、86、110等,主要与力矩要求有关。
确定定位精度和振动方面的要求情况:判断是否需细分,需多少细分。根据电机的电流、细分和供电电压选择驱动器。
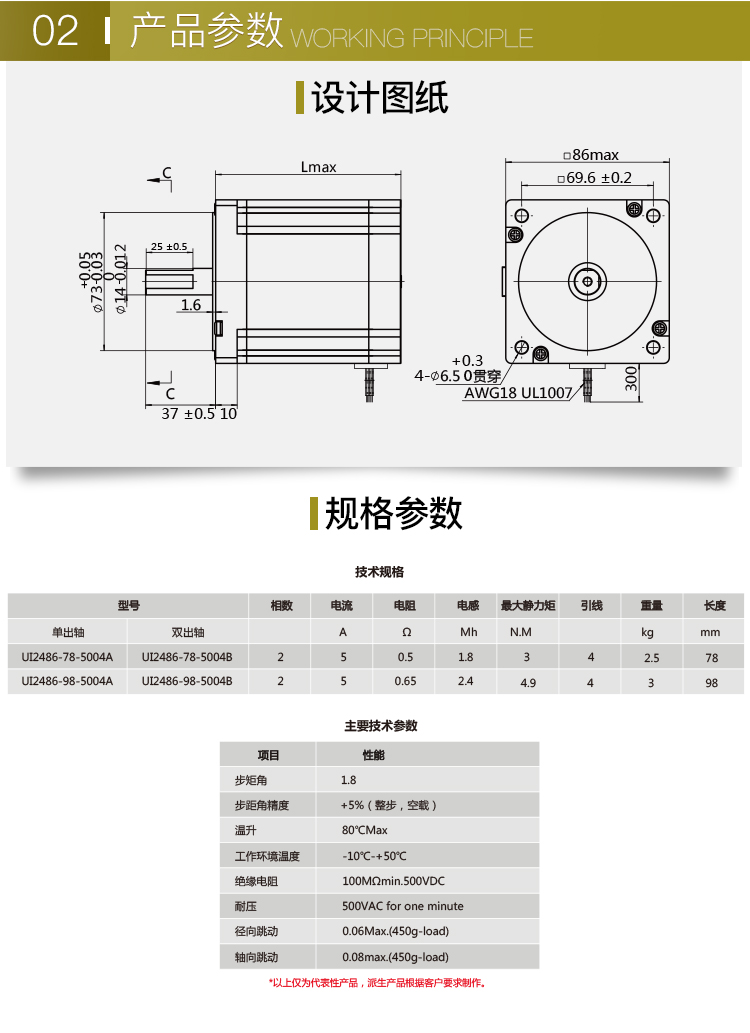
86系列两相步进电机
通用规格
|
步距精度 |
+5%(整步、空载) |
|
温升 |
80°CMax |
|
环境温度 |
-10°C -- +50°C |
|
绝缘电阻 |
100MΩmin.500VDC |
|
耐压 |
500VAC for one minute |
|
径向跳动 |
0.06 Max.(450g-load) |
|
轴向跳动 |
0.08 max.(450g-load) |
技术规格
|
Model No. |
相数 |
步距角 |
保持转矩 |
额定电流 |
相电感 |
相电阻 |
引线数量 |
转子惯量 |
电机重量 |
机身长 |
适配驱动器 |
|
(°) |
N.M |
A |
mH |
Ohm |
g.cm2 |
Kg |
mm |
||||
|
UI2486-78-4504A |
4 |
1.8 |
3 |
4.5 |
5.6 |
1.6 |
4 |
1050 |
2.5 |
78 |
UIM240X |
|
UI2486-98-5004A |
4 |
1.8 |
4.9 |
5.0 |
2.4 |
0.65 |
4 |
1550 |
3.0 |
98 |
UIM240X |
|
UI2486-126-5004A |
4 |
1.8 |
6.4 |
5.0 |
3.4 |
0.85 |
4 |
2200 |
1.8 |
126 |
UIM240X |
|
UI2486-150-5004A |
4 |
1.8 |
8.5 |
5.0 |
5.2 |
0.9 |
4 |
2500 |
4.2 |
150 |
UIM240X |
*以上仅为代表性产品,派生产品根据客户要求制作。