



厂商 :北京华控图形科技
山西 长治市- 主营产品:
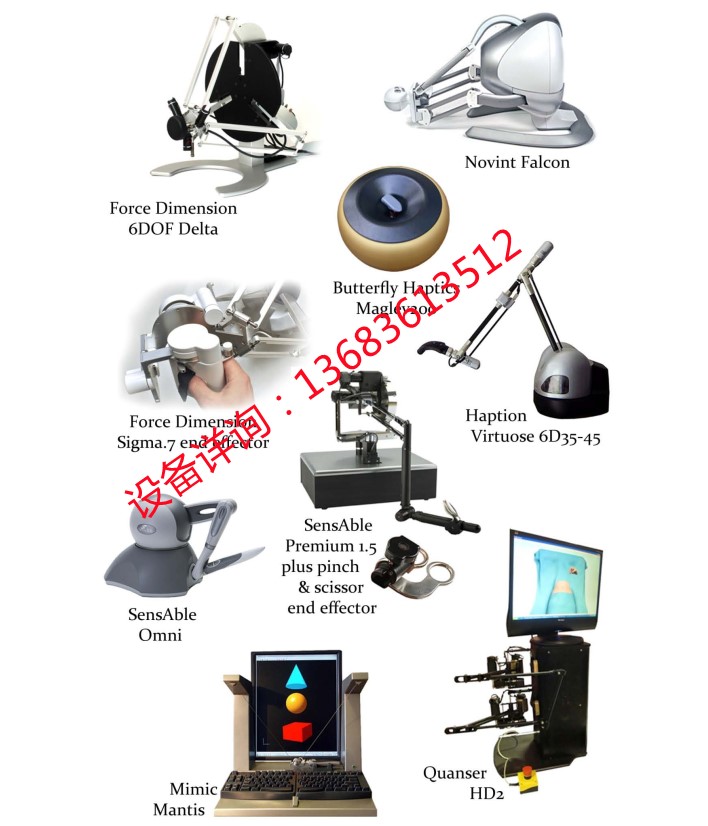
- 触觉力反馈遥操作机
- 六自由度触觉力反馈遥
- 触觉力反馈遥操作手术
Omega.7六自由度触觉力反馈力解决方案
Omega.7力反馈凭借其独特的主动抓取延伸功能,成为一款技术、多功能的触觉设备。 Omega.7力反馈的末端执行器涵盖了人类手部的自然运动范围,设计与双手控制的操作台兼容。 全重力补偿和无漂移校准相结合有助于提高用户的舒适度和准确性,专为对于性能和可靠性至关重要的苛刻应用而设计。
Omega.7提供七自由度主动力反馈,旋转感应和主动抓取,广泛适用于:
>医疗机器人和空间机器人
>微型和纳米机器人
>遥控操作台
>虚拟模拟
>训练系统
>研究
Omega.7 触觉力反馈特点:
Omega.7触觉设备具有一些独特的特性,使其成为最的多点触控触摸应用的。
积极把握
Omega.7提供了自由度作为抓握机制。
旋转感应
Omega.7具有旋转感应延伸,该延伸是完全重力补偿的,并且设计成避免来自由平移力产生的寄生扭矩的干扰。
质量
Omega.7的设计具有的性能 - 没有塑料部件用于设备的任何机械部件,以实现的可靠性和触觉质量。
准确性
传感器提供一次性无漂移校准。
刚度
由于其独特的平行运动学结构,Omega.7触觉装置具有的闭环刚度,可实现更鲜明的真实感。
舒适
主动重力补偿将Omega.7的用户疲劳降至。
安全
机载CPU实时监控速度,并且如果主机出现问题,则可以在触觉设备上实现电磁阻尼。
易于使用
Omega.7附带Force Dimension SDK,它提供了一种开发触觉应用程序的简单,灵活和强大的解决方案。
Omega.7是上的桌面7自由度触觉设备。Omega.7建立在多功能的Omega.3基础上,具有高精度主动抓取功能和方向感应功能。
经过精细调整以显示的重力补偿,力反馈夹具提供非凡的触觉功能,可以与复杂的触觉应用进行交互。 机器人的航空航天和医疗行业使用,其高度人体工程学和独特的设计使Omega.7成为安全关键应用的设备。Omega.7有左手和右手配置可供选择,可以集成在双工作站设置中使用双手操作。

独特的设计理念
围绕其独特的平行运动学结构精心打造,Omega.x系列专为高性能而设计。 其的机械刚度与其实时USB 2.0控制器相结合,能够以4 KHz的速率渲染高接触力。 为了提供高触觉透明度,通过将被动部件和致动部件结合在一起,可以在平移和定位空间中保持的重力补偿。
每个系统都经过单独校准以确保可重复和的精度和性能。 其独特的运动学设计使omega.x基座能够适应各种可互换的末端执行器,以满足各种应用需求。

|
工作空间 |
平移 |
?160 x 110mm |
|
|
控制距离 |
25mm |
|
|
旋转 |
240 x 140 x 180° |
|
力 |
解析力 |
12N |
|
|
控制力 |
± 8.0 N |
|
解析度 |
解析精度 |
<0.01mm |
|
|
转动精度 |
0.09° |
|
|
控制精度 |
0.006mm |
|
刚度 |
闭环 |
14.5 N / mm |
|
设备尺寸 |
h×w×d |
270×300×350mm |
|
接口 |
刷新率 |
高达4KHZ |
|
工作电压 |
|
110V - 240V |
|
工作平台 |
微软 |
Windows |
|
|
Linux |
所有版本 |
|
|
Apple |
macOS |
|
|
Blackberry |
QNX |
|
软件开发包 |
|
haptic SDK robotic SDK |
|
结构 |
|
基于delta的并联动力学结构 |
|
|
|
以手为中心的解耦旋转 |
|
|
|
主动的重力补偿 |
|
校准 |
|
自动校准/无漂移 |
|
用户输入 |
|
力反馈可编程按钮 |
|
安全性 |
|
速率监控 电磁阻尼 |
|
可选择 |
|
左手/右手 |

