



厂商 :洛阳绅达轴承有限公司
河南 洛阳市- 主营产品:
- 精密交叉滚子轴承
- 回转支承
机器人轴承厂家供应 机器人轴承供应商

谐波传动是一种非常特殊的动力传动方式,具有一般传动方式不可比拟的优越性,它具有传动比大,精度高,承载能力大,传动效率高,体积小,重量轻等诸多优点,因此被广泛应用于空间技术、电子工业、军事工业、机器人、包装机械、印刷机械、数控机床、医疗器械等领域,具有非常广泛的应用空间。我们一般称为谐波减速器或者谐波减速机,而谐波减速机用的输出端轴承是交叉滚子轴承、我们称其为谐波减速器轴承。
现代工业机器人的发展趋于轻量化,轴承要安装在有限的空间,必须体积小、重量轻。同时,机器人轴承必须具备高承载能力、高精度、高刚性、低摩擦力矩、长寿命、高可靠性的性能,才能保证机器人的高载荷、高回转精度、高回转稳定性、高定位速度、高重复定位精度、长寿命、高可靠性的性能。
工业机器人轴承作为工业机器人的关键配套部件之一,主要包括等截面薄壁轴承,薄壁交叉圆柱滚子,谐波减速器轴承,直线轴承,关节轴承等,但使用多的还是前两种轴承。
工业机器人轴承的分类
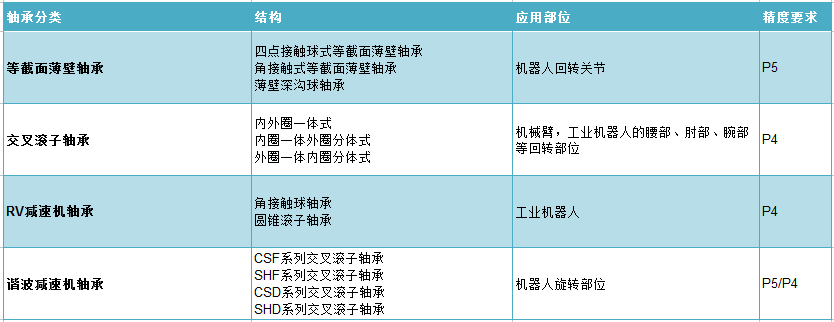

谐波减速器用交叉滚子轴承具有以下主要特点:
*高负荷承载能力设计
*高刚性
*尺寸及旋转精度高于国际标准
*同时承受任何方向的负荷
*旋转顺畅度好
*体积小生空间易于小型紧凑化设计
*容易安装和调整
*多种轴承型式与尺寸以供易佳选择
*可以提供定制化设计
针对以上特点及谐波减速器的不同结构类型,谐波减速器轴承也分为不同的结构类型,具体为:
CSF系列谐波减速器交叉滚子轴承(标准型)
CSG系列谐波减速器交叉滚子轴承(高刚性型)
CSD系列谐波减速器交叉滚子轴承(薄截面型)
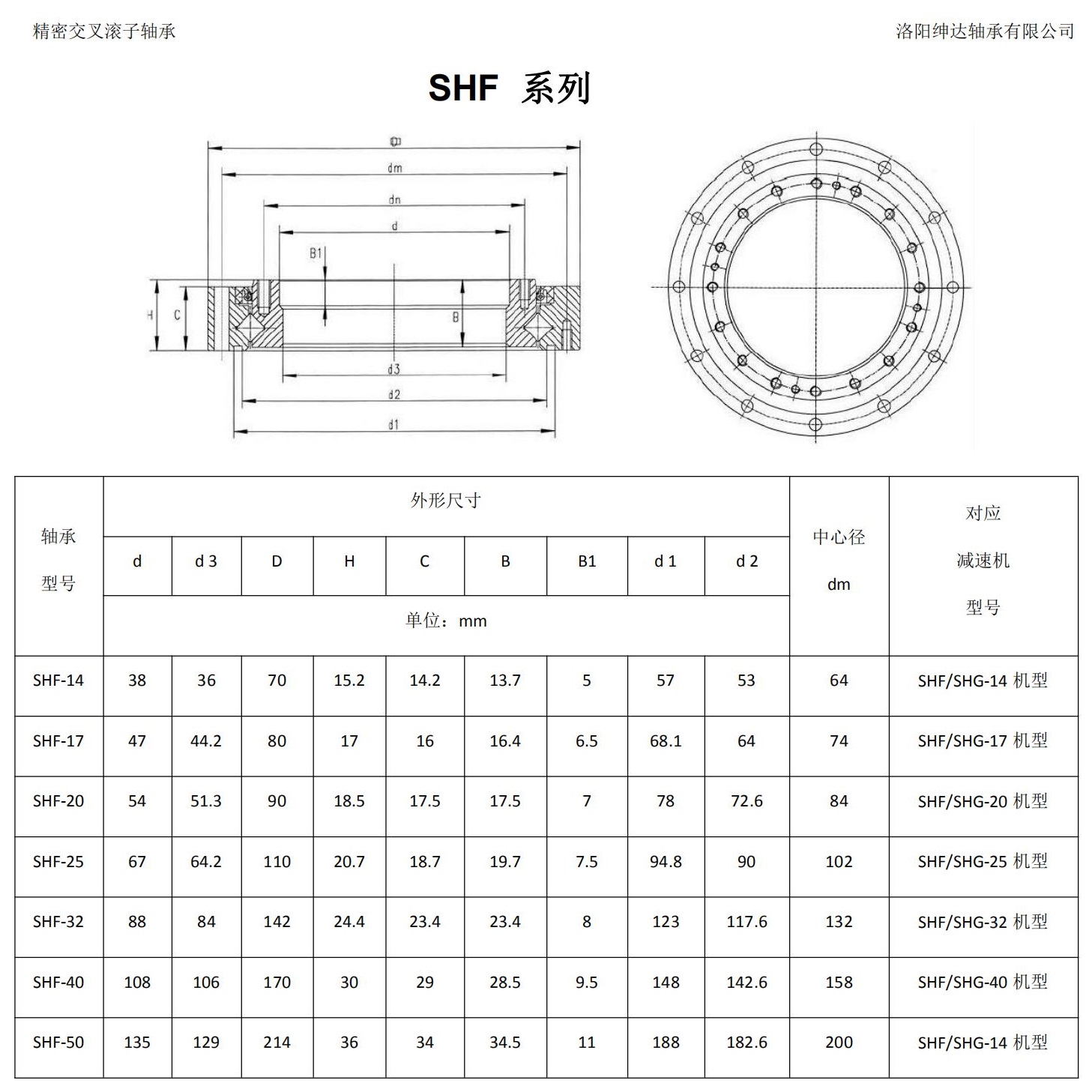
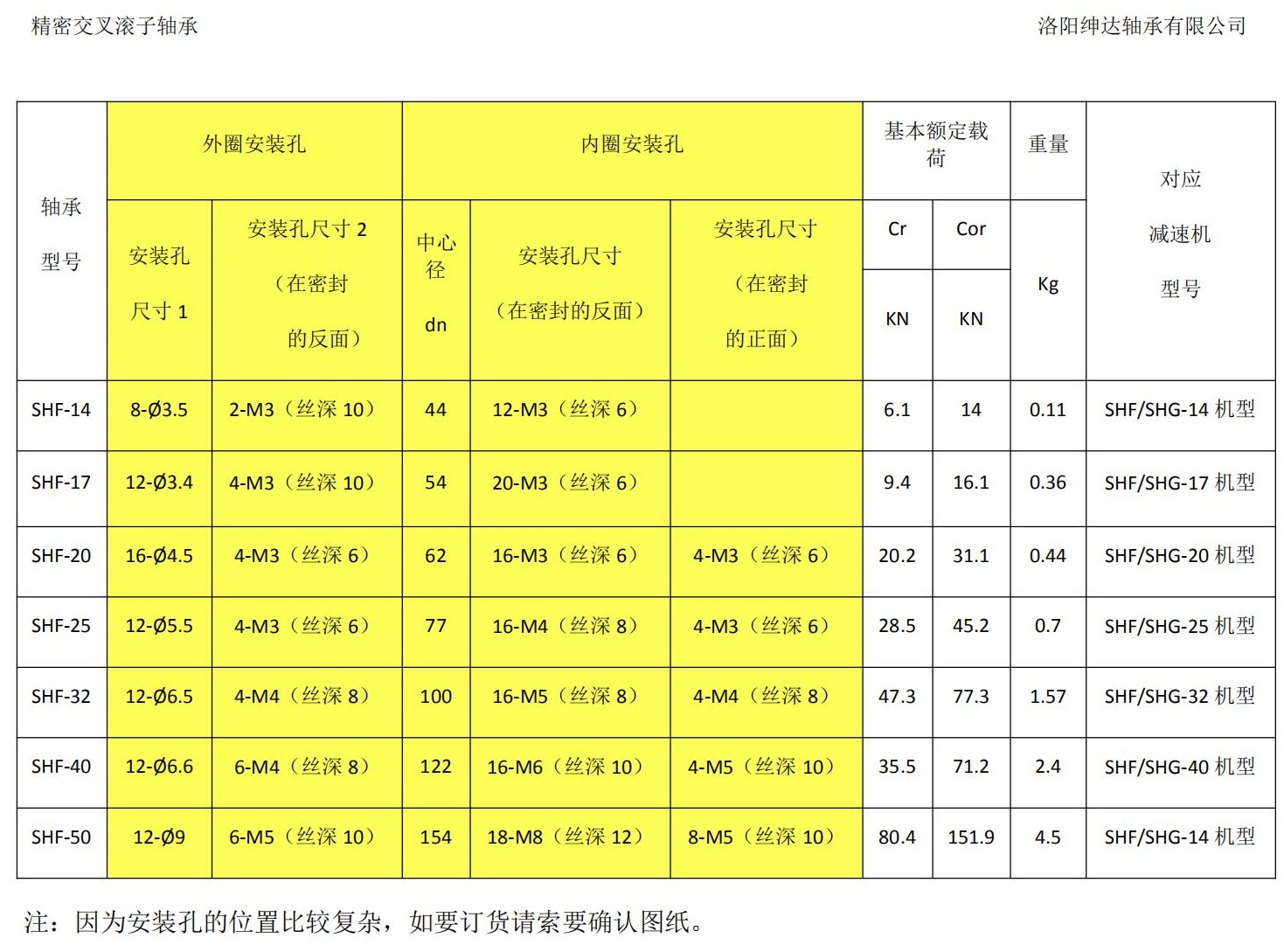
SHF系列谐波减速器交叉滚子轴承(标准型)
SHG系列谐波减速器交叉滚子轴承(高刚性型)
SHD系列谐波减速器交叉滚子轴承(薄截面型)
谐波减速机轴承轴向间隙的调整
1、调整垫片法:
在轴承端盖与轴承座端面之间填放一组软材料(软钢片或弹性纸)垫片,调整时,先不放垫片装上轴承端盖,一面均匀地拧紧轴承端盖上的螺钉,一面用手转动轴,直到轴承滚动体与外圈接触而轴内部没有间隙为止。这时测量轴承端盖与轴承座端面之间的间隙,再加上谐波减速机轴承在正常工作时所需要的轴向间隙,这就是所需填放垫片的总厚度,然后把准备好的垫片填放在轴承端盖与轴承座端面之间,后拧紧螺钉。
2、调整螺栓法:
把压圈压在交叉滚子轴承的外圈上,用调整螺栓加压。在加压调整之前,首先要测量调整螺栓的螺距,然后把调整螺栓慢慢旋紧,直到轴承内部没有间隙为止,然后算出调整螺栓相应的旋转角。例如螺距为1.5mm,轴承正常运转所需要的间隙,那么调整螺栓所需要旋转角为3600×0.15/l.5=360.这时把调整螺栓反转360,谐波减速机轴承就获得0.5mm的轴向间隙,然后用止动垫片加以固定即可。
导致谐波减速机轴承发热的原因及解决方法
1、原因:谐波减速机轴承精度低。解决方法:选用高精度等级的谐波减速器轴承。
2、原因:主轴弯曲或箱体孔不同心。解决方法:修复主轴或箱体。
3、原因:皮带过紧。解决方法:调整皮带使松紧适当。
4、原因:谐波减速器轴承的润滑不良。解决方法:选用规定牌号的润滑脂并适当清洁。
5、原因:装配质量低。解决方法:提高装配质量。
6、原因:谐波减速器轴承的内外壳跑圈。解决方法:更换谐波减速器轴承及相关磨损部件。
7、原因:轴向力太大。解决方法:清洗、调正密封口环间隙要求0.2~0.3mm之间,校验静平衡值。
8、原因:谐波减速机轴承损坏。解决方法:更换轴承。
-
 内外法兰厂家供应 内外法兰供应商 法兰盘回转支承 回转支承带法兰SLD20/744
内外法兰厂家供应 内外法兰供应商 法兰盘回转支承 回转支承带法兰SLD20/744
-
内外法兰厂家供应 内外法兰供应商 法兰盘回转支承 回转支承带法兰SLD20/644
-
 内外法兰厂家供应 内外法兰供应商 法兰盘回转支承 回转支承带法兰SLD20/544
内外法兰厂家供应 内外法兰供应商 法兰盘回转支承 回转支承带法兰SLD20/544
-
 内外法兰厂家供应 内外法兰供应商 法兰盘回转支承 回转支承带法兰SLD20/414
内外法兰厂家供应 内外法兰供应商 法兰盘回转支承 回转支承带法兰SLD20/414
-
 外法兰内齿哪家好 外法兰内齿厂家直销 外法兰内齿SLID20544
外法兰内齿哪家好 外法兰内齿厂家直销 外法兰内齿SLID20544
-
外法兰内齿哪家好 外法兰内齿厂家直销 外法兰内齿SLID20644
-
 外齿内法兰厂家直销 外齿内法兰厂家供应
外齿内法兰厂家直销 外齿内法兰厂家供应
-
 外齿内法兰厂家直销 外齿内法兰厂家供应 内法兰SLOD20844回转支承 内法兰SLOD20844回转支承
外齿内法兰厂家直销 外齿内法兰厂家供应 内法兰SLOD20844回转支承 内法兰SLOD20844回转支承
-
 外齿内法兰厂家直销 外齿内法兰厂家供应 内法兰SLOD2044 内法兰SLOD20644回转支承
外齿内法兰厂家直销 外齿内法兰厂家供应 内法兰SLOD2044 内法兰SLOD20644回转支承
-
外齿内法兰厂家直销 外齿内法兰厂家供应 内法兰SLOD20544 内法兰SLOD20544回转支承