


厂商 :深圳市巨力方视觉技术有限公司
广东 深圳市- 主营产品:
- 机器视觉系统集成
- 激光检测系统集成
- 运动控制系统集成
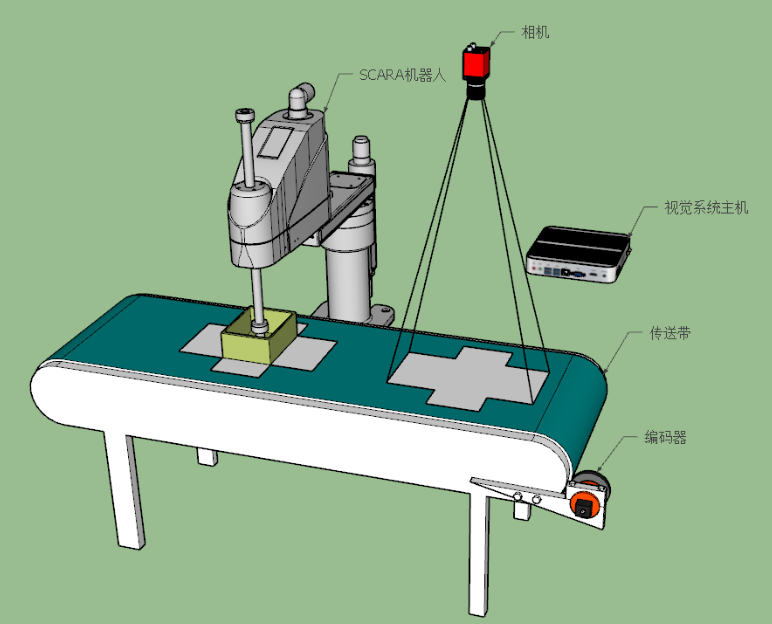
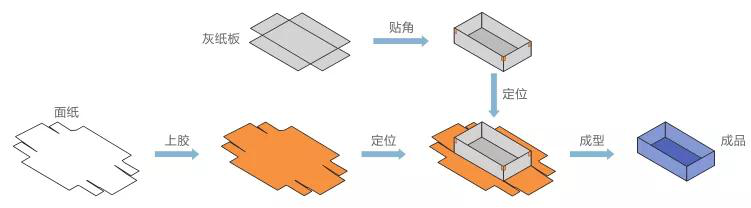
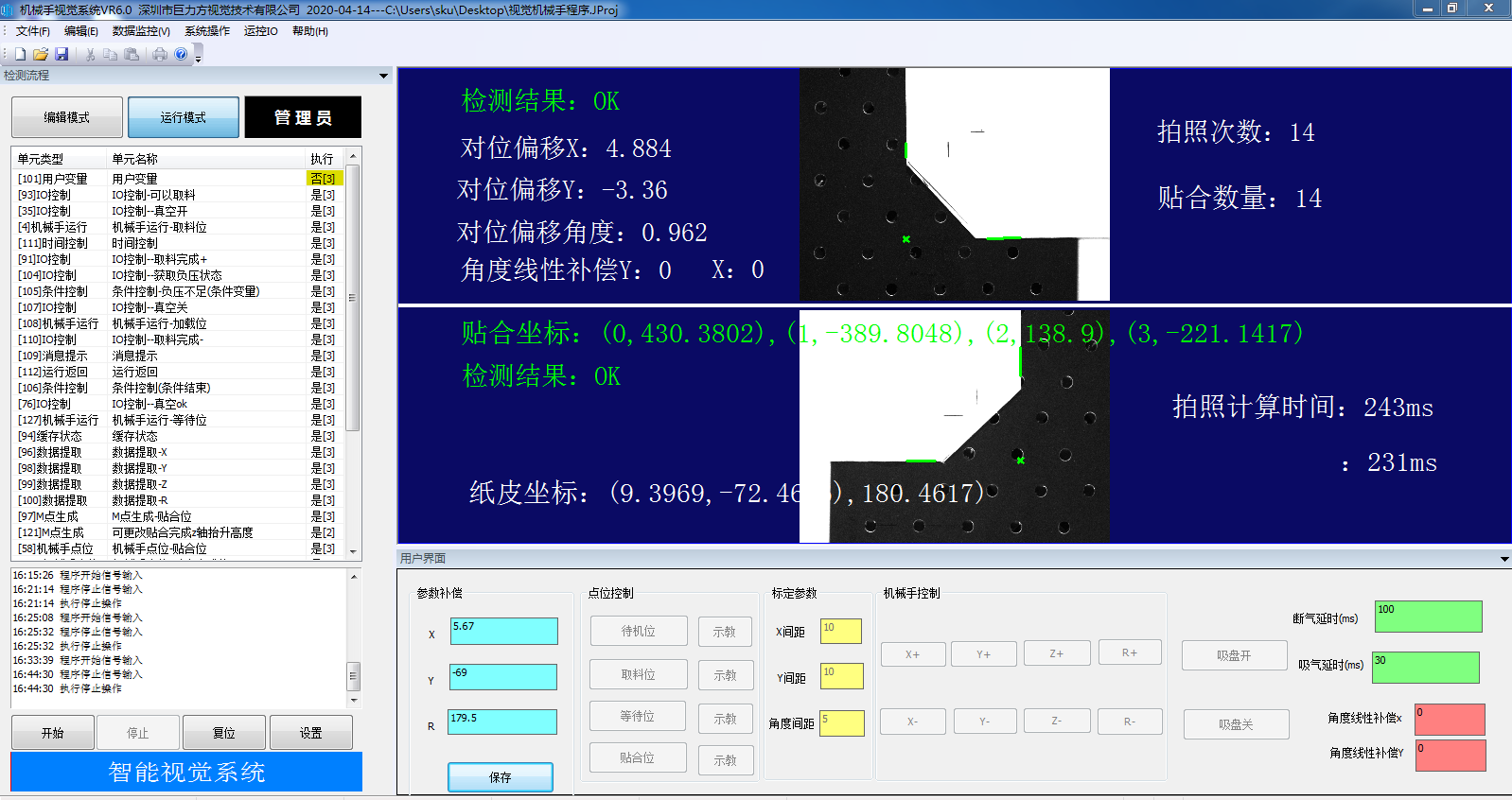
天地盖结构简单,模式化的比重大,在实际的生产中,很容易形成标准化,从而实现自动化生产,降低成本,相对于工艺比较复杂的折叠盒、书型盒,具有不可比拟的优势。 ?在天地盖生产中,纸张通过模切、覆膜等步骤,制成大小、形状一致的面纸;灰纸亦通过模切、开槽、贴角等步骤,剪裁成大小形状一致,然后再和面纸进行贴合,而这一连串工序完全可全自动化作业。 而要做到高速,?准确地生产,?定位贴合是关键的一步.?采用视觉动态跟踪机器人进行自动定位及贴合操作,?可以很好的解决人手操作中贴合精度上的缺陷,?而且贴合速度更快,?重复性更好. 一个天地盖视觉对位跟踪贴合系统由以下硬件组成: 机器人(SCARA) 传送带 视觉定位系统 编码器(检测传送带的位置和速度) ▲天地盖生产的贴合工序 面纸通过自动飞达机构上胶传送到皮带上,皮带运动经过光电传感器最后停在拍照位。机械手收到允许取料信号后到取料位抓取纸壳。上位机接收到拍照信号后触发相机拍照识别面纸边缘,计算偏移角度和坐标并发送给机械手。机械手根据接收到的偏移坐标完成贴合动作。 从整个贴合过程可以看,前期的送纸、过胶,后期的抓盒、成型等步骤均是已经成熟的技术,而要做到高速、高精,视觉定位是关键。 对此,推出了针对天地盖的高精度视觉定位系统,同时配置进口及国产 机器人可以大大提升天地盖自动化贴合时的定位精度以及生产效率。此外,该系统操作简便,在人机交互界面中,用户可快速切换视觉模板以及微调贴合位置补偿值,无需第三方机械手软件即可实现机械手轨迹示教、路径规划、通讯测试,视觉直接控制YAMAHA机器人运行。 精选案例: 识别传送带上面纸的位置角度,计算与基准坐标的偏移量。将偏移量发送给机械手,机械手根据偏移量抓取纸壳完成贴合。 系统构成: ? 相机:20个 ? 像素:500w ? 机械臂:YAMAHA四轴机械臂 方案实施: 产品利用两个红色条形光,皮带为黑白双拼色,以满足不同产品颜色的需求。相机采集图片,识别面纸边缘,计算偏移角度和坐标。机械手根据偏移坐标完成取料贴合。
机器视觉系统集成 激光检测系统集成 运动控制系统集成 视觉自动定位系统 尺寸测量系统 视觉外观检测系统 CCD视觉系统解决方 非标设备软件开发

 公司简介
公司简介

 深圳市巨力方视觉技术有限公司
深圳市巨力方视觉技术有限公司








